m0_thread Struct Reference
#include <thread.h>
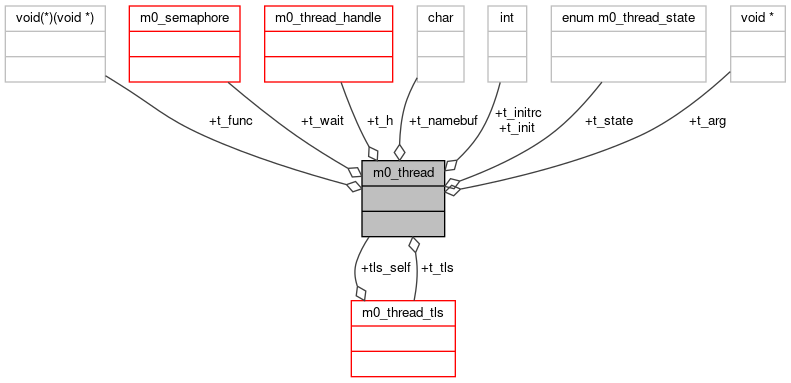
Collaboration diagram for m0_thread:
Data Fields | |
| enum m0_thread_state | t_state |
| struct m0_thread_handle | t_h |
| int(* | t_init )(void *) |
| void(* | t_func )(void *) |
| void * | t_arg |
| struct m0_semaphore | t_wait |
| int | t_initrc |
| struct m0_thread_tls | t_tls |
| char | t_namebuf [M0_THREAD_NAME_LEN] |
Detailed Description
Control block for a thread.
States
A thread control block can be in one of the following states:
- PARKED: thread is not yet started or has been joined already. In this state m0_thread::t_func is NULL;
- RUNNING: the thread started execution of m0_thread::t_func function, but hasn't yet been joined. Note that the thread can be in this state after return from m0_thread::t_func.
Concurrency control
A user is responsible for serialising access to a control block. For example, there should be no concurrent calls to m0_thread_init() or m0_thread_join() for the same m0_thread.
Liveness
Implementation only accesses control block as part of explicit calls to m0_thread interface functions. A user is free to destroy the control block at any moment, except for the possible resource leak in the case of running (and not yet joined) thread.
Field Documentation
◆ t_arg
◆ t_func
◆ t_h
| struct m0_thread_handle t_h |
◆ t_init
◆ t_initrc
◆ t_namebuf
| char t_namebuf[M0_THREAD_NAME_LEN] |
◆ t_state
| enum m0_thread_state t_state |
◆ t_tls
| struct m0_thread_tls t_tls |
◆ t_wait
| struct m0_semaphore t_wait |
The documentation for this struct was generated from the following file:
- lib/thread.h
