stubs.c File Reference
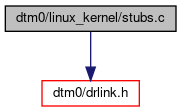
#include "dtm0/drlink.h"
Include dependency graph for stubs.c:
Go to the source code of this file.
Functions | |
| M0_INTERNAL int | m0_dtm0_rpc_link_mod_init (void) |
| M0_INTERNAL void | m0_dtm0_rpc_link_mod_fini (void) |
| M0_INTERNAL int | m0_dtm0_req_post (struct m0_dtm0_service *svc, struct m0_be_op *op, const struct dtm0_req_fop *req, const struct m0_fid *tgt, const struct m0_fom *parent_fom, bool wait_for_ack) |
Function Documentation
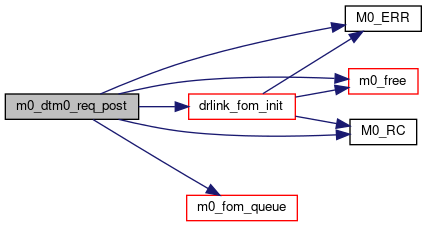
◆ m0_dtm0_req_post()
| M0_INTERNAL int m0_dtm0_req_post | ( | struct m0_dtm0_service * | svc, |
| struct m0_be_op * | op, | ||
| const struct dtm0_req_fop * | req, | ||
| const struct m0_fid * | tgt, | ||
| const struct m0_fom * | parent_fom, | ||
| bool | wait_for_ack | ||
| ) |
Asynchronously send a DTM0 message to a remote DTM0 service.
- Parameters
-
svc local DTM0 service. req DTM0 message to be sent. tgt FID of the remote DTM0 service. parent_fom FOM that caused this DTM0 message (used by ADDB). wait_for_ack Determines whether the local service should wait for a reply from the counterpart. TODO: this may be converted into a proper clink and/or co_op later.
- Returns
- An error is returned if there is not enough resources (-ENOMEM) or if the remote service does not exist in the conf cache (-ENOENT).
Definition at line 45 of file stubs.c.
Here is the call graph for this function: